 Ingeniería
y sus Alcances,
Revista de Investigación
Ingeniería
y sus Alcances,
Revista de Investigación
https://doi.org/10.33996/revistaingenieria.v6i14.94
enero-abril 2022
Volumen 6 / No. 14
ISSN: 2664 – 8245
ISSN-L: 2664 - 8245
www.revistaingenieria.org
pp. 124 – 139

Fotogrametría en la generación del modelo digital de un
terreno mediante drones
Photogrammetry in the generation of the digital model of a terrain using
drones
Fotogrametria
na geração de um modelo de terreno digital utilizando drones
Alejandro Martínez Taboada
alejandro.mt93@gmail.com
https://orcid.org/0000-0003-3030-8965
Universidad del Valle, Sucre –
Bolivia
Artículo recibido el 29 de septiembre 2021
/ Aceptado el 28 de octubre 2021 / Publicado el 26 de enero 2022
RESUMEN
El
objetivo de esta investigación es aplicar la fotogrametría en la generación del
modelo digital de un terreno mediante vehículos aéreos no tripulados, en
Bolivia, para una planta de tratamiento de aguas residuales. El plan de vuelo
se realiza con GNSS, las fotografías fueron tomadas por un drone
DJI Inspire 1, el post proceso de datos fue en Agisoft
Metashape y la vectorización
en AutoCAD 2018. Se orientaron 448 fotografías, la diferencia de alturas entre
el matadero de COPROCACH LTDA y la planta de tratamiento de aguas residuales es
183.16 metros; con un error total de 12.9924 mm. El
trabajo cumple con los parámetros de calidad de fotogrametría, se concluye que
las nuevas técnicas y software permiten obtener curvas de nivel a cualquier intervalo
y cota. Asimismo, el uso de receptores RTK es un complemento de la técnica que
ayuda a compensar sus propias deficiencias.
Palabras clave: Fotogrametría; Modelo digital;
Terreno; Modelación; Técnica
ABSTRACT
The objective of this research was to apply
photogrammetry in the generation of a digital terrain model using unmanned
aerial vehicles, in Bolivia, for a wastewater treatment plant. The flight plan
was made with GNSS, the photographs were taken by a DJI Inspire 1 drone, the
data post-processing was in Agisoft Metashape and the vectorization
in AutoCAD 2018. 448 photographs were oriented, the difference in heights
between the COPROCACH slaughterhouse LTDA and the wastewater treatment plant is
183.16 meters: with a total error of 12.9924 mm. The work complies with the
photogrammetry quality parameters, it is concluded that the new techniques and
software allow obtaining contour lines at any interval and elevation. Also, the
use of RTK receivers is a complement to the technique that helps to compensate
for its own deficiencies.
Key
words: Photogrammetry; Digital model; Land;
Modeling; Technique
RESUMO
O objectivo desta
investigação é aplicar a fotogrametria na geração de um modelo de terreno
digital utilizando veículos aéreos não tripulados na Bolívia para uma estação
de tratamento de águas residuais. O plano de voo é feito com GNSS, as
fotografias foram tiradas por um drone DJI Inspire 1, o pós-processamento de dados foi em Agisoft
Metashape e a vectorização
em AutoCAD 2018. 448 fotografias foram orientadas, a diferença de alturas entre
o matadouro da COPROCACH LTDA e a estação de tratamento de águas residuais é de
183,16 metros; com um erro total de 12,9924 mm. O
trabalho obedece aos parâmetros de qualidade da fotogrametria, conclui-se que
as novas técnicas e software permitem obter linhas de contorno em qualquer
intervalo e elevação. Além disso, a utilização de receptores RTK é um
complemento à técnica que ajuda a compensar as suas próprias deficiências.
Palavras-chave:
Fotogrametria; Modelo digital; Terreno;
Modelação; Técnica; Fotogrametria; Fotogrametria; Modelação digital
INTRODUCCIÓN
En las últimas décadas,
el avance tecnológico ha aumentado a una velocidad vertiginosa. Muchos son los
campos beneficiados, entre ellos la ingeniería y por consiguiente el desarrollo
de maquinaria, técnicas y herramientas que facilitan el trabajo (OACI, 2019).
Los vehículos aéreos no tripulados (UAV, por sus siglas en inglés) más
conocidos como drones, se presentan como una
alternativa interesante para llevar a cabo levantamientos topográficos mediante
la técnica fotogramétrica (Quirós, 2014; Fenercom,
2015).
El uso de drones permite la toma de fotografías aéreas georreferenciadas que sirven para la creación de modelos
digitales de terrenos y la representación cartográfica de éstos (OACI, 2019).
Este progreso en la forma de obtener fotografías aéreas, sumado al desarrollo
de los programas informáticos, permite que la fotogrametría, técnica utilizada
desde hace varias décadas, se adapte a la era digital y facilite el trabajo del
profesional (Santamaría, 2011).
Sobre todo, se ha
popularizado el uso de los sistemas de posicionamiento por satélite,
permitiendo que en la actualidad la toma de información en el campo sea cada
vez más fácil, segura y genere resultados de mayor calidad en cuanto a la
certidumbre de los datos recolectados, así como a que esta recolección masiva
de información permita representar en los planos situaciones más fidedignas de
un terreno.
En algunos países,
entre ellos Bolivia, aún se realizan mediciones con equipos topográficos
convencionales, las jornadas de los levantamientos son largas, requieren de
varias personas para su ejecución y pueden presentar situaciones donde el
acceso de los topógrafos a los sitios donde se realizará la medición supone
riesgos (Vallejos, 2017). Esto supone un problema, pues la importancia de los
datos obtenidos a partir de los levantamientos topográficos es notable en la
formulación y ejecución de proyectos y existe la necesidad que la obtención de
datos confiables en el menor tiempo posible. Otro problema de las técnicas
tradicionales es el costo, tanto en la etapa de campo como en la de gabinete,
esto a raíz del desplazamiento de personal técnico a campo, así como el
personal que realizará el procesamiento (McComarc,
2004).
Frente a esta problemática, el
objetivo de esta investigación fue aplicar la fotogrametría en la generación
del modelo digital del terreno mediante vehículos aéreos no tripulados. El estudio
se desarrolló en Bolivia, para la planta de tratamiento de aguas residuales
COPROCACH del municipio de Sucre, cuidad capital del departamento de
Chuquisaca. Se presenta en este documento la fundamentación teórica necesaria
para la comprensión de la técnica, además de la descripción detallada del
proceso de su aplicación, desde la planificación hasta la presentación de
resultados.
METODOLOGÍA
El diseño metodológico
se desarrolla bajo el paradigma positivista, con alcance aplicado. El
procedimiento consiste en: (1) Revisión del soporte científico; (2)
Reconocimiento del terreno; (3) Plan de vuelo mediante imágenes satelitales.
(4) Levantamiento topográfico. El soporte científico se basó en: Jiménez
(2007); Agisoft. (2019); Anderson (1988); Franquet y Querol (2010); Jiménez
(2007). Los manuales consultados fueron: Manual de Pix4D (2019); Agisoft. (2019); DJI (2016).
El reconocimiento del
terreno implica una evaluación visual de posibles obstáculos tales como torres
de energía eléctrica y diferencia de alturas significativas en las montañas del
entorno. El plan de vuelo a su vez requirió aplicar los siguientes pasos: (a)
Puntos de control con GNSS RTK; (b) Vuelo con dron y
adquisición de fotografías; (c) Post proceso de datos en Agisoft
Metashape; (d) Control de calidad; (e) Informe de
procesamiento de productos finales a partir del levantamiento fotogramétrico,
mediante vectorización en AutoCAD 2018.
Para determinar los
puntos de control se require de sistemas globales de
navegación por satélites, los usados fueron: GPS. - Sistema estadounidense;
GLONASS - Sistema ruso y; GALILEO. - Sistema europeo. La obtención de los datos
se realizó con el equipo Topcon GR-5 (en modo de
trabajo RTK), debido a las precisiones centimétricas
que ofrece. El equipo utilizado está compuesto por una base, un rover, el colector de datos y los accesorios. Asimismo, se
usó un drone DJI Inspire 1 para el
levantamiento fotogramétrico.
Se realizaron
iteraciones de vuelo hasta obtener un resultado aceptable de por lo menos GSD
de 5 cm/pix; a una altura de vuelo de 120; plan de
adquisición tipo rejilla; traslape de 90% frontal y 80% transversal, referido a
la dimensión vertical de la fotografía (debido a las limitaciones de la
aplicación); tiempo de vuelo no mayor a 11 minutos.
Las fórmulas que se aplicaron fueron
las siguientes:
Ecuación 1: Distancia cubierta
Ecuación 2: GSD
Ecuación 3: Recubrimiento longitudinal

Dónde: p% = Recubrimiento longitudinal
expresado en porcentaje.
Ecuación 4: Porcentaje de carga útil
consumido durante la misión
PB: Porcentaje de carga útil consumido
durante la misión (%).
tP: Tiempo de Vuelo
Propuesto (min)
tMáx: Tiempo de Vuelo
Máximo (min)
NMáx: Nivel de la batería
Máximo (%)
NÚtil: Nivel de la batería
Útil (Nivel Real – 20%) (%)
RESULTADOS
Reconocimiento del
terreno
La zona en estudio fue Khora Khora, ubicada en el
distrito 6 del municipio de Sucre, provincia Oropeza, departamento de
Chuquisaca (Bolivia). A 7 km de la zona de Rumi Rumi, Salida a Tarabuco, con coordenadas UTM: Norte7888356.496;
Este 266520.931; Elevación 2925 msnm. Zona definida por serranías bajas y
colinas de suaves ondulaciones que combinan con planicies de cumbre o altas.
Los suelos del área de emplazamiento se caracterizan por ser mayormente
rocosos, con poca actividad agrícola. La pendiente superior es más plana, mayor
profundidad y capa arable predispuesta al cultivo. Suelos poco profundos con
débil a moderada pedogénesis, estructuralmente poco
desarrollados, en bloques subangulares de clases
finas, con una consistencia ligeramente adherente y plástica en mojado, muy
friable en húmedo y blanda en seco y cuyas características físicas están
relacionadas con la clase textural y contenido de grava y piedra.
Las cimas de la
serranía son subredondeadas y elongadas,
con algunas áreas de cultivo, que mayormente son a secano. Las cimas están
cubiertas por gramíneas en macollo con poca sinusia
arbustiva, en partes producen maíz y trigo para subsistencia. En general el
área antrópica se halla en las pendientes superiores y cimas con cultivos a
secano. Taxonómicamente los suelos de los piedemontes están clasificados como: Litic Ustorthent y Typic Ustochrept.
Los de las pendientes inferiores están representados en el subgrupo de: Litic Ustorthent.
Los de las pendientes medias, taxonómicamente, se hallan clasificados como: Litic Ustorthent y Typic Ustochrept.
Finalmente, los suelos de las pendientes superiores y de las cimas, se hallan
clasificados como: Litic Ustorthent.
El Matadero se halla emplazado entre la pendiente superior y la cima de la
serranía media.
Según el análisis geológico: el área
tiene sedimentos de edad ordovícica y sedimentos sueltos del Cuaternario. El
ordovícico que constituye la parte estratigráfica basal, está conformada por
una serie de lutitas y limolitas
amarillo verdosas en superficie fresca a pardo amarillentas cuando están
meteorizadas, ligeramente friables, algo micáceas, a las que suprayace otro horizonte lutítico
amarillo verdoso, intercalado con limolitas de
tonalidad similar, con estratificación en bancos delgados, intercaladas con
areniscas verde grisáceas en frescas y verde amarillentas cuando están
alteradas, con granulometría fina a media.
Todo el material suelto o escasamente
consolidado que se encuentra formando la cubierta sobre las rocas ordovícicas,
constituyen los sedimentos cuaternarios, presentándose los siguientes tipos de
material: (a) Los depósitos aluviales, originados en las partes altas del
paisaje y depositados en la parte inferior de los mismos por acción de la
gravedad. El material está conformado por gravas y guijarros de formas semiredondeadas a subredondeadas;
(b) Los depósitos aluviales que han sido acumulados por el desarrollo de las
pequeñas quebradas transversales que fluyen en él; (c) Litológicamente se
hallan conformados por arenas, limos y arcillas de formas subangulares,
debido al escaso transporte que han tenido; (d) El cuadro tectónico está
constituido por pliegues pequeños y por fallas locales, y hacia el Este del
área de estudio, se presentan fallas inversas de mayor desarrollo y longitud.
Plan de vuelo
Se calcula la altura de
vuelo según la ecuación del GSD, para lo que se hicieron iteraciones hasta
obtener un resultado aceptable (GSD de por lo menos 5 cm/pix).
Ecuación 2

Se seleccionó una
altura de vuelo de 120 m por posibles variaciones con un GSD estimado de 5,25
cm/px; plan de adquisición.
Se determinó el tiempo de vuelo con la
ecuación 5.
Ecuación 5
Se determina el porcentaje del nivel útil de
batería.
Ecuación 4

En consecuencia, se realizaron 3 vuelos para
poder cubrir toda la zona. Asimismo, se definió una proporción de 4:3 para cada
misión. El modelo básico de cada misión fue definido a partir de las siguientes
ecuaciones:
Ecuación 1
Ecuación 3

Por limitante de Pix4D Capture.

En la Figura 1 se esquematiza el modelo
básico para la misión de vuelo y los elementos que la definen. Siendo: M-1 =
Misión uno, M-2 = Misión dos, M-3 = Misión tres
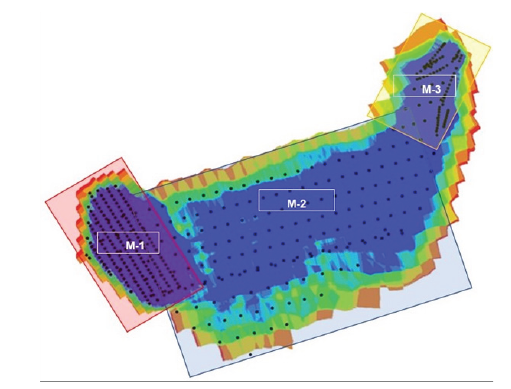
Figura 1. Distribución
de misiones de vuelo.
Las misiones se desarrollaron en el
transcurso de dos (2) día de trabajo, considerando horas útiles de vuelo
(altura del sol sobre el horizonte, función de la latitud, de la fecha y la
hora). Las tres (3) misiones se ejecutarán de forma autónoma (preprogramadas), el plan de vuelo queda definido por:
recubrimiento transversal = 26,678 m; recubrimiento longitudinal= 13,339 m;
escala final de la fotografía aérea horizontal = 209,99 m; escala final de la
fotografía aérea vertical = 157,49 m; traslape transversal= 80%; traslape
longitudinal = 90%; velocidad de vuelo = 13,0 m/s; distancia focal = 3,61 mm.
Las misiones se desarrollaron en el
transcurso de dos (2) día de trabajo, considerando horas útiles de vuelo
(altura del sol sobre el horizonte, función de la latitud, de la fecha y la
hora). La adquisición de las fotografías implica las siguientes actividades; preparación
del equipo, movilización a la zona de despegue y aterrizaje, procedimientos de
seguridad necesarios para realizar la actividad, procesos de calibración y
ajustes básicos de la cámara.

Figura 2. Fotografías
obtenidas del área de estudio.
Habiendo obtenido las imágenes presentadas en
la Figura 2, se procede al procesamiento de datos. Mediante el uso del software
Agisoft Metashape construye
un modelo 3D con textura. Se trabaja con un estándar de 5 m en posición horizontal
y de 10 m en la vertical. Se selecciona como sistema de coordenadas de salida y
de los puntos de apoyo terrestre WGS84 / UTM zona 20S, proyección UTM, que usa
el elipsoide WGS84 como modelo base. En la Figura 3 se presenta la nube de
puntos densa generada para el proyecto.
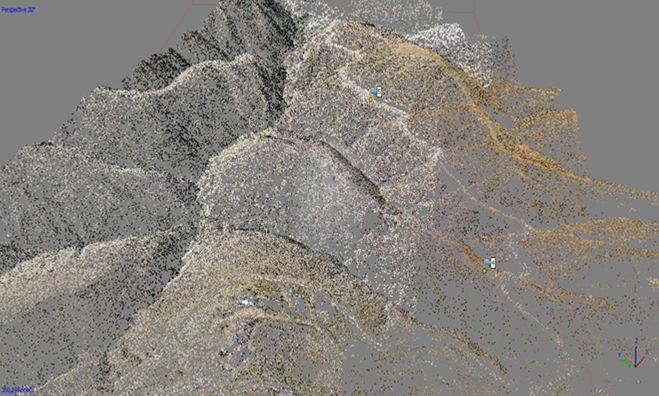
Figura 3. Nube de
puntos densa
Una vez generada la nube de puntos densa se
ubicaron los puntos de control de manera visual con banderines en el software Agisoft Metashape. La cantidad de
puntos fue 45,206,557, con tres (3) bandas de colores.
Asimismo, los parámetros de reconstrucción fueron: cantidad media; filtrado de
profundidad agresivo; tiempo de generación de mapas de profundidad 52 min y 35
s.

Figura 4. Distribución
de puntos de control en el proyecto.
Como se observa en la Figura 3, una vez
ubicados los puntos de control se generarán banderines de color azul.
Posteriormente se posicionó de manera manual los banderines generados en cada
foto que contenga puntos de control de manera visual, obteniendo así la
posición correcta. Posteriormente, se procedió a la vectorización
en ortomosaico, para así extraer información
topográfica y conocer a detalle los componentes del terreno (ver Figura 5). Los
parámetros fueron: tamaño 36,007 x 32,419; sistema de coordenadas W GS 84 / UTM
zone 20S (EPSG:32720); tres
(3) bandas de colores, unit8. Los parámetros de reconstrucción fueron: modo
mezcla mosaico; superficie modelo digital de elevaciones; si se realizó el
relleno de agujeros; el procesamiento duró 17 min y 40 s.

Figura 5. Vectorización en AutoCAD a partir del ortomosaico.
En la Figura 5 se
observa la vectorización del ortomosaico
en AutoCAD 2018
Control de calidad de
resultados
El informe de
resultados del proyecto muestra un resumen de las características del proyecto,
vistas del ortomosaico y el DSM, y detalles de la
calibración y geolocalización de las imágenes, entre
otros. Es importante revisar los resultados prestando atención a los parámetros
de control de calidad, que son los siguientes.
Imágenes, una marca de
verificación verde indica que las imágenes tienen suficiente contenido visual
para ser procesadas. Una advertencia amarilla o roja indica que no hay mucho
contenido visual que podría ser extraído de las imágenes. Esto puede conducir a
un bajo número de coincidencias en las imágenes y una reconstrucción incompleta
o resultados de baja calidad.
Conjunto de datos, una marca de
verificación verde indica que más del 95% de las imágenes habilitadas fueron
calibradas en un bloque. Una advertencia amarilla indica que entre el 60% y el
95% de las imágenes habilitadas fueron calibradas o que más del 95% de las
imágenes habilitadas fueron calibradas en varios bloques. Una advertencia roja
indica que menos del 60% de las imágenes habilitadas fueron calibradas.
Optimización de la cámara, una marca de
verificación verde indica en lentes con control de perspectiva que el
porcentaje de la diferencia entre la longitud focal inicial y la optimizada es
menor que 5%, mientras que en lentes de ojo de pez indica que el porcentaje de
diferencia entre los parámetros iniciales y optimizados de transformación
afines a C y F es menor que 5%. Una advertencia en color amarillo indica que el
porcentaje de diferencia entre los parámetros mencionados anteriormente se
encuentra entre 5% y 20%, mientras que una advertencia en color rojo indica que
este valor es mayor que el 20%, lo que produce un error en el procesamiento.
Pareo, una marca de
verificación en color verde indica que los resultados son susceptibles a ser de
alta calidad en las áreas calibradas. Una señal de advertencia en color
amarillo o rojo indica un bajo número de pareos entre las imágenes calibradas,
lo que indica que los resultados podrían no ser muy fiables.
Georreferenciación, una marca de
verificación en color verde indica que han sido usados Puntos de control y el
error de estos es menor que el GSD promedio. Una advertencia en color amarillo
indica que se han usado Puntos de control con un error menor a dos veces el GSD
promedio o que no han sido usados Puntos de control en el proyecto. Una
advertencia en color rojo indica que han sido usados Puntos de control, pero su
error es mayor que dos veces el GSD promedio.
Informe fotogramétrico
de planta de tratamiento de aguas residuales COPROCACH LTDA.
A continuación, se presentan los datos del
levantamiento. En la Figura 6 se observa las posiciones de las cámaras y el
solapamiento de imágenes.
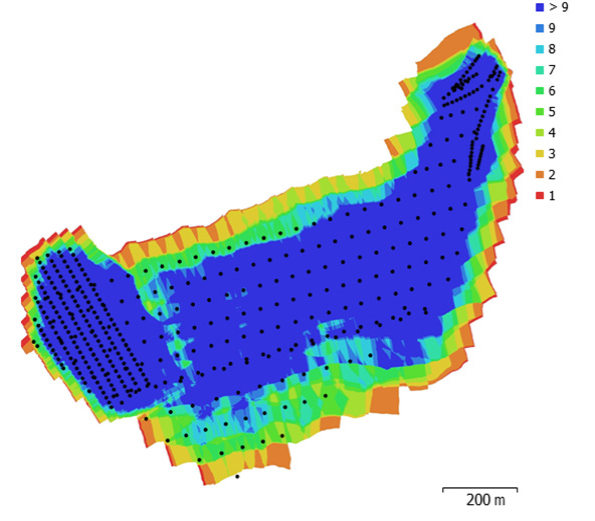
Figura 6. Posiciones
de cámaras y solapamiento de imágenes.
El resumen del vuelo con dron
es el siguiente: 449 imágenes; 120 m de altitud media de vuelo; 5.25 cm/pix de resolución en terreno; 0.813 km² superficie
cubierta; 448 posiciones de cámara; 350,199 puntos de enlace; 1,710,093 proyecciones; se considera un 1,84 pix error de reproyección. Dichos
parámetros corresponden a las siguientes características técnicas del dron usado: modelo de cámara FC350 (3.61mm); 4000 x 3000 de
resolución; 3.61 mm distancia focal; 1.56 x 1.56 micras de tamaño de píxel; no precalibrada. La calibración de la cámara fue graficada
según se muestra en la Figura 7.
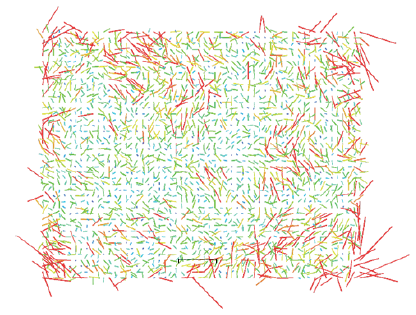
Figura 7. Gráfico
de calibración residuales para FC350 (3,61 mm).
Los coeficientes de calibración y matriz de
correlación se presentan en la Tabla 1.
Tabla 1. Coeficientes
de calibración y matriz de correlación.
|
|
Valor
|
Error
|
F
|
Cx
|
Cy
|
B1
|
B2
|
K1
|
K2
|
K3
|
K4
|
P1
|
P2
|
|
F
|
2326.33
|
0.63
|
1.00
|
0.32
|
0.21
|
-0.11
|
-0.05
|
-0.33
|
0.23
|
-0.15
|
0.14
|
-0.08
|
0.01
|
|
Cx
|
-30.1613
|
0.11
|
|
1.00
|
-0.08
|
-0.05
|
-0.07
|
-0.11
|
0.08
|
-0.06
|
0.06
|
0.46
|
-0.03
|
|
Cy
|
-7.67073
|
0.087
|
|
|
1.00
|
0.11
|
-0.07
|
-0.01
|
-0.01
|
0.03
|
-0.03
|
-0.06
|
0.48
|
|
B1
|
0.686978
|
0.057
|
|
|
|
1.00
|
-0.08
|
0.02
|
-0.02
|
0.01
|
-0.01
|
-0.04
|
-0.05
|
|
B2
|
-3.98312
|
0.052
|
|
|
|
|
1.00
|
0.01
|
0.00
|
-0.01
|
0.01
|
0.04
|
-0.05
|
|
K1
|
-0.134767
|
0.00036
|
|
|
|
|
|
1.00
|
-0.97
|
0.92
|
-0.88
|
-0.00
|
0.04
|
|
K2
|
0.122362
|
0.0012
|
|
|
|
|
|
|
1.00
|
-0.99
|
0.96
|
0.01
|
-0.04
|
|
K3
|
-0.0358586
|
0.0016
|
|
|
|
|
|
|
|
1.00
|
-0.99
|
-0.02
|
0.04
|
|
K4
|
0.0106699
|
0.00069
|
|
|
|
|
|
|
|
|
1.00
|
0.02
|
-0.03
|
|
P1
|
0.000335945
|
1.3e-05
|
|
|
|
|
|
|
|
|
|
1.00
|
0.01
|
|
P2
|
6.88586e-05
|
1.2e-05
|
|
|
|
|
|
|
|
|
|
|
1.00
|
El color indica el error en Z mientras el
tamaño y forma de la elipse representan el error en XY. Posiciones estimadas de
puntos de apoyo se indican con los puntos negros, puntos de control - con
cruzamiento.
Tabla 2. Coeficientes
de calibración y matriz de correlación.
|
Nombre
|
Error X (mm)
|
Error Y (mm)
|
Error Z (mm)
|
T otal (mm)
|
Imagen (pix)
|
|
1
|
16.3456
|
-6.88078
|
-2.76648
|
17.9493
|
0.405 (21)
|
|
2
|
-24.2128
|
-6.59259
|
4.12809
|
25.4315
|
0.393 (22)
|
|
3
|
1.88828
|
13.6224
|
-0.859627
|
13.7795
|
0.385 (20)
|
|
4
|
1.19457
|
2.94906
|
-1.43909
|
3.49213
|
0.155 (8)
|
|
5
|
6.47653
|
-2.5513
|
0.606183
|
6.98727
|
0.295 (12)
|
|
6
|
0.282725
|
-4.54238
|
2.21315
|
5.06075
|
0.597 (24)
|
|
7
|
-4.1976
|
-7.06691
|
3.17117
|
8.81007
|
0.987 (18)
|
|
8
|
-5.76922
|
-3.29646
|
-6.91686
|
9.59133
|
1.163 (16)
|
|
9
|
-6.57987
|
7.39723
|
0.408535
|
9.90861
|
1.019 (11)
|
|
10
|
-3.75781
|
12.7311
|
-1.77604
|
13.3924
|
1.317 (12)
|
|
11
|
2.00829
|
0.71288
|
1.94331
|
2.88407
|
0.650 (13)
|
|
12
|
16.877
|
-6.10896
|
1.60785
|
18.0205
|
0.592 (19)
|
|
T otal
|
10.3989
|
7.23217
|
2.89183
|
12.9924
|
0.725
|
En cuanto a los puntos de control terrestres,
las posiciones de puntos de apoyo y estimaciones de errores se presentan en la
Figura 8.
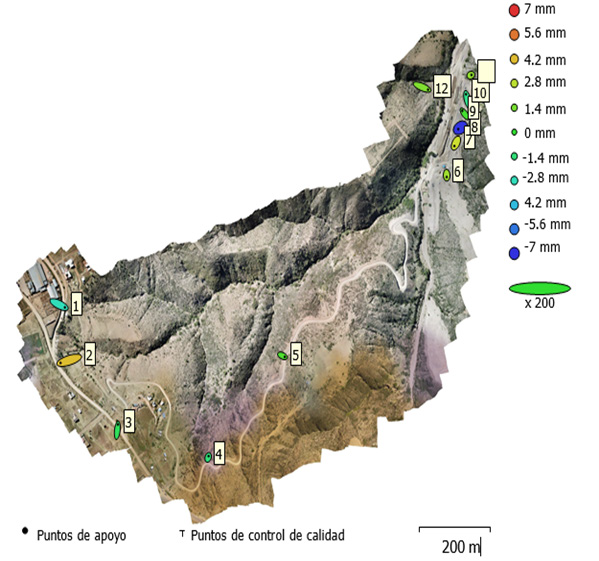
Figura 8. Posiciones
de puntos de apoyo y estimaciones de errores.
En cuanto al modelo digital de elevaciones,
la Figura 9 permite visualizar la degradación de colores generada. Asimismo,
esta misma figura muestra las curvas de nivel en cada metro.
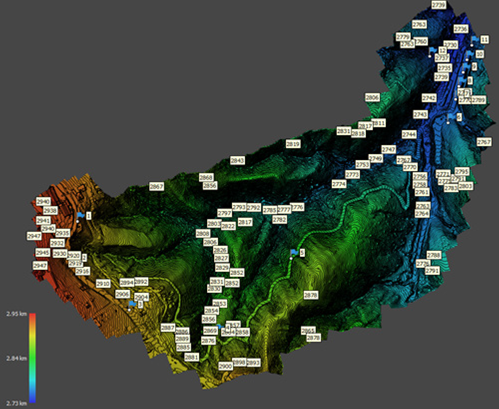
Figura 9. Modelo
digital de elevaciones (DEM) y curvas de nivel en cada metro.
Finalmente,
en la Figura 10 se presenta el modelado 3D de la malla.
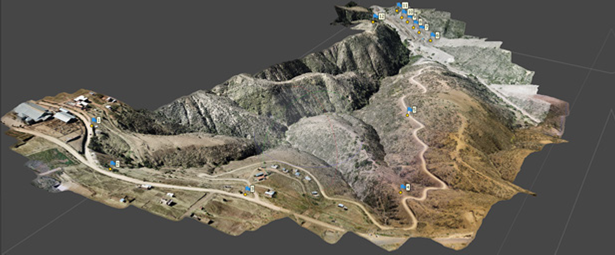
Figura 10. Modelado
3D (malla).
Los resultados se
sintetizan según de la siguiente manera: (a) En el levantamiento fotogramétrico
se obtuvo un GSD o resolución espacial por píxel de 5.25 cm, curvas de nivel de
la superficie en las zonas descubiertas de vegetación y un ortomosaico
actualizado del terreno de COPROCACH LTDA, cubriendo un área de 81.3000
hectáreas, cumpliendo los objetivos propuestos en el estudio; (b) Se obtuvieron
un total de 449 fotografías de las cuales se orientaron correctamente 448; (c)
La diferencia de alturas obtenidas del DEM entre el matadero de COPROCACH LTDA
es de 2929.096 msnm y la planta de tratamiento de aguas residuales se encuentra
a 2745.936 msnm cuya diferencia es de 183.16 m; (d) Siendo que, en el flujo de
trabajo fotogramétrico se necesita del apoyo terrestre para mejorar los
resultados, el uso de GNSS RTK se convierte en un complemento de la técnica que
apoya en ellas para compensar sus propias deficiencias.
A continuación (e) El
área cubierta por las fotografías debe ser mayor al área de interés, ya que el ortomosaico tiende a deformarse en los extremos; (f) El
error total es muy bajo de (12.9924 mm) por lo tanto se puede definir que el
trabajo se realizó de manera correcta y cumple con los parámetros de calidad de
fotogrametría; (g) Las nuevas técnicas y software permiten obtener curvas de
nivel a cualquier intervalo y cota; (h) El error total entre los resultados
fotogramétricos y los puntos de control obtenidos con receptor RTK es de (12,99
mm) por lo tanto se puede definir que el trabajo cumple con los parámetros de
calidad de fotogrametría; (i) El uso de receptores RTK se convierte en un
complemento de la técnica que ayuda a compensar sus propias deficiencias.
CONCLUSIONES
Se aplicó la fotogrametría aérea
digital a través de drones en levantamientos
fotogramétricos que permitieron crear modelos digitales del terreno y la
representación cartográfica de este. Este progreso apoyado programas
informáticos, permitió facilitar el trabajo del ingeniero civil. Como resultado
del proyecto se presentó un informe del procesamiento, el modelo digital de
elevaciones, ortomosaico, curvas de nivel en AutoCAD
2018 y vectorización del ortomosaico
en AutoCAD 2018. Para el éxito del proyecto se consideró los siguiente: todo
levantamiento fotogramétrico mediante UAVs requiere
levantamientos terrestres para mejorar su precisión; los proyectos pequeños
requieren como mínimo tres puntos de control y los grandes deben tener al menos
5; la toma de fotografías aéreas se debe realizar cuando la altitud del sol sea
óptima, debe adoptarse una altura mínima de 30° del sol sobre el horizonte y en
regiones poco accidentadas puede llegarse a los 20°; usar filtros de la cámara
polarizador circular para la fotografía al aire libre da margen de maniobra al
tratar con reflexión especular; los puntos de control deben ser tomados con
sistema RTK con precisión inferior a 1 cm.
Para la obtención de productos
cartográficos mediante esta metodología, es fundamental partir de una buena
planificación del proyecto de vuelo fotogramétrico, considerando la orografía y
el contenido visual presente (vegetación densa, cuerpos de agua, campos de
agricultura, etc.), corrigiendo la precisión del modelo y los posibles errores
que se puedan producir, propios de la técnica digital y del uso software
fotogramétrico.
Esta técnica que
permite conseguir millones de puntos con color; mientras que antes el topógrafo
debía ir observando punto por punto. Además, reduce el tiempo de procesado y,
por lo tanto, los costos de trabajo disminuyen, además de tener mucha más
información que un levantamiento tradicional.
REFERENCIAS
Agisoft. (2019).
Requerimientos de sistema. Obtenido de https://www.agisoft.com/ downloads/system-requirements/
Anderson, J. M. M. E. (1988).
Introducción a la topografía. Mexico: Mc Graw Hill.
DJI. (2016). Especificaciones
técnicas Inspire 1. Obtenido de https://www.dji.com/
inspire-1/info
Fenercom. (2015). Los Drones y sus aplicaciones a la ingenieria
civil. Obtenido de https:// www.fenercom.com/pdf/publicaciones/
Los-Drones-y-sus-aplicaciones-a-la-ingenieria-civil-fenercom-2015.pdf
Franquet, B. J. y Querol, G. A. (2010). Nivelación de terrenos por regresión
tridimensional. Obtenido de http://www.mecinca.net/ papers/Nivelacion_REGRESION.pdf
Jiménez, C. G. (2007). Topografía para
ingenieros. Bogotá: Universidad del Quindío.
McComarc, J. (2004).
Topografía. México: Limusa Wiley
OACI. (2019). La Aviación Unida.
Obtenido de ORGANISMO ESPECIALIZADO DE LAS NACIONES UNIDAS:
https://www.icao.int/ about-icao/pages/es/default_es.aspx
Pix4D. (2019). Herramientas -
Calculadora GSD. Obtenido de https://support.pix4d. com/hc/en-us/articles/202560249-TOOLS-GSD-calculator
Quirós, R. E. (2014). Introducción a la Fotogrametría y Cartografía aplicadas a la
Ingeniería Civil. Madrid: Universidad de Extremadura
Santamaría, P. A. (2011). La
cartografía y las proyecciones cartográficas. Madrid: Universidad de La Rioja
Vallejos, Z. H. (2017). Delimitación de zonas
de manejo en agricultura de precisión a partir de adquisición remota de
imágenes mediante vehículos aéreos no tripulados (Doctoral dissertation)